Ayuda de AutoTURN Online
SmartPath Tools como Generar simulación con una trayectoria en arco le permite generar una simulación de giro del vehículo. Esto se hace de manera instantánea al mover el mouse en la dirección de trayectoria.
SmartPath Tools representa la velocidad del vehículo, la fricción lateral y el peralte, como se explica en las siguientes secciones.
El radio mínimo de giro de una trayectoria generada se determina a partir del radio mínimo de giro del vehículo como se calcula a partir del ángulo de dirección máximo o de un radio mínimo de giro calculado a partir de la velocidad del vehículo, la fricción lateral y el peralte. Se usa el más grande de estos dos radios.
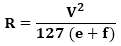
El radio mínimo de giro, en función de la velocidad, la fricción lateral y el peralte, se calcula utilizando la siguiente fórmula:
|
Unidades métricas |
Unidades del sistema inglés |
|
R = radio (m) V = velocidad (km/h) e = peralte (m/m, por ejemplo 0,02 = 2/100) f = fricción (por ejemplo, 0,03) |
R = radio (pi) V = velocidad (mph) e = peralte (pi/pi, por ejemplo 0,02 = 2/100) f = fricción (por ejemplo, 0,03) |
Los factores de fricción lateral y de peralte predeterminados utilizados en AutoTURN Online se basan en valores de AASHTO (2004). Los valores predeterminados se pueden anular en el momento que se crea la simulación.
Por lo general, la maniobras en reversa se consideran para ejecutarse con vehículos de piezas únicas y no pueden ser llevadas a cabo por vehículos con más de dos piezas. La fricción lateral y el peralte no se representan en maniobras en reversa. Las maniobras en reversa no se representan en 10 km/h (6 mph) o menos, velocidades en las que estos factores pueden ser insignificantes.
Las simulaciones de giro creadas a partir de trayectorias dibujadas previamente no se representan para la velocidad, la fricción lateral, el peralte ni el índice del giro del volante.
Solo las maniobras de avance son posibles con trayectorias dibujadas previamente. Las maniobras en reversa no se pueden llevar a cabo utilizando SmartPath Tools.
La trayectoria deberá ser generada por el usuario usando una serie de líneas y arcos conectados o solo una polilínea.